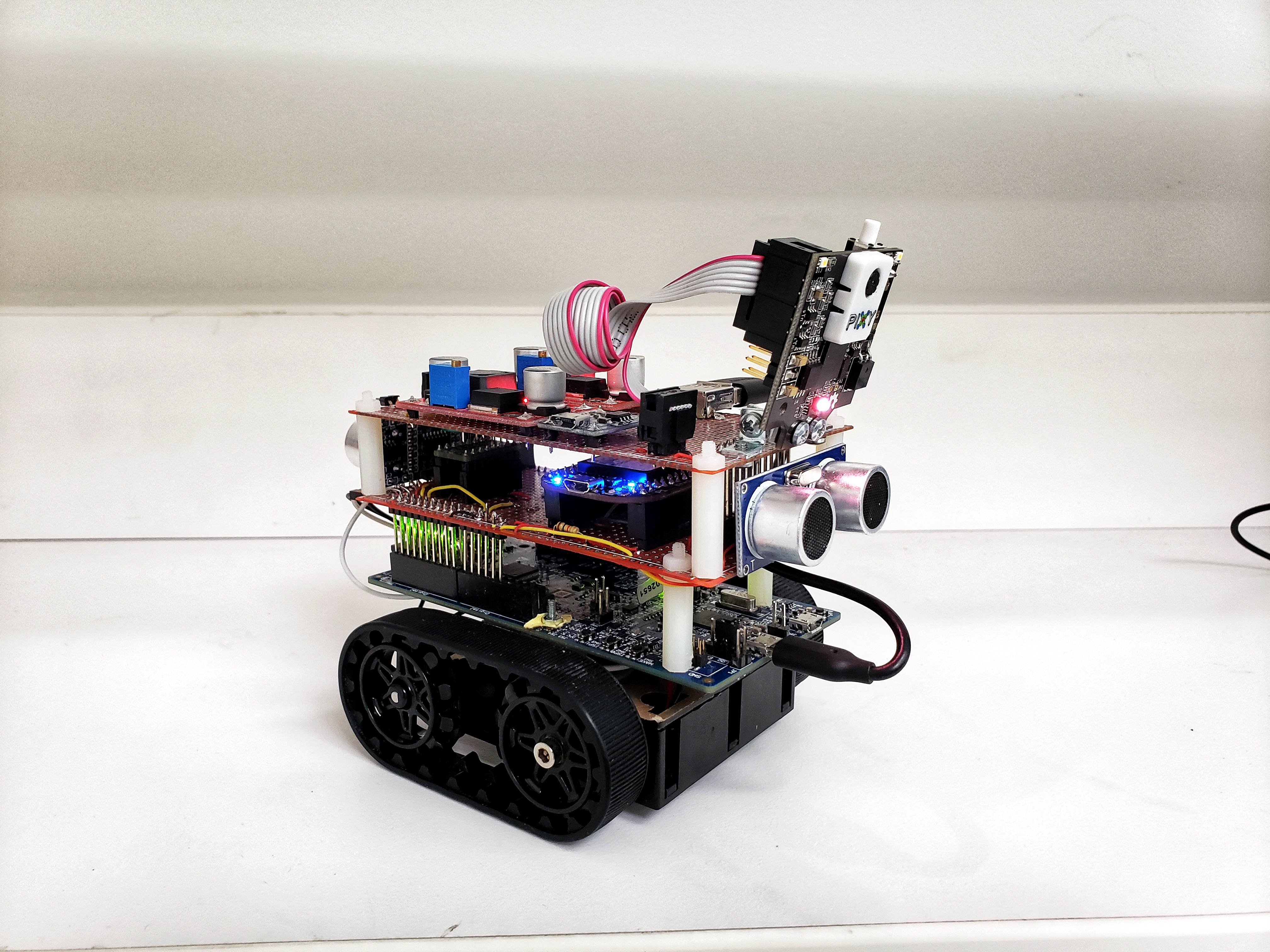
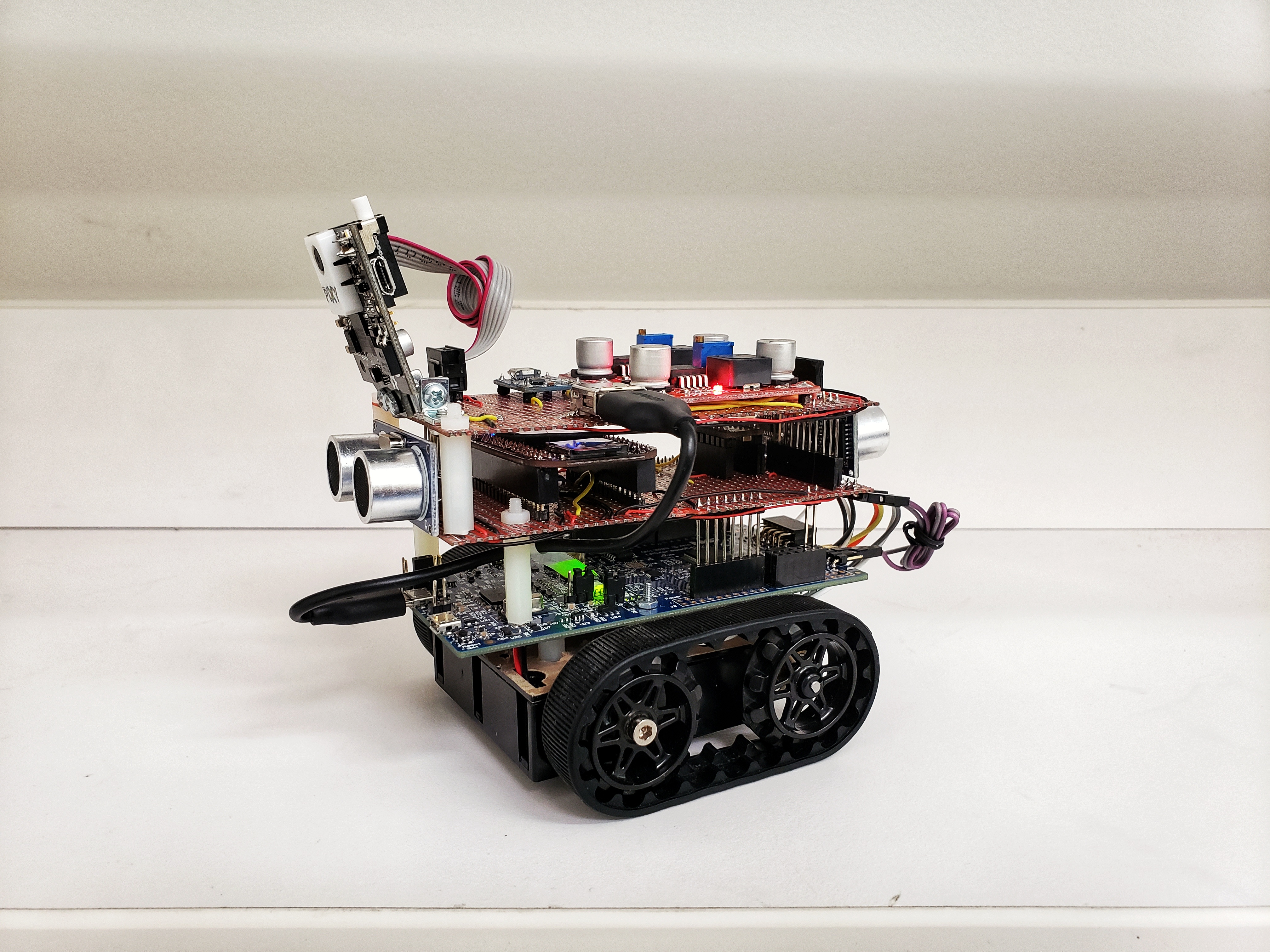
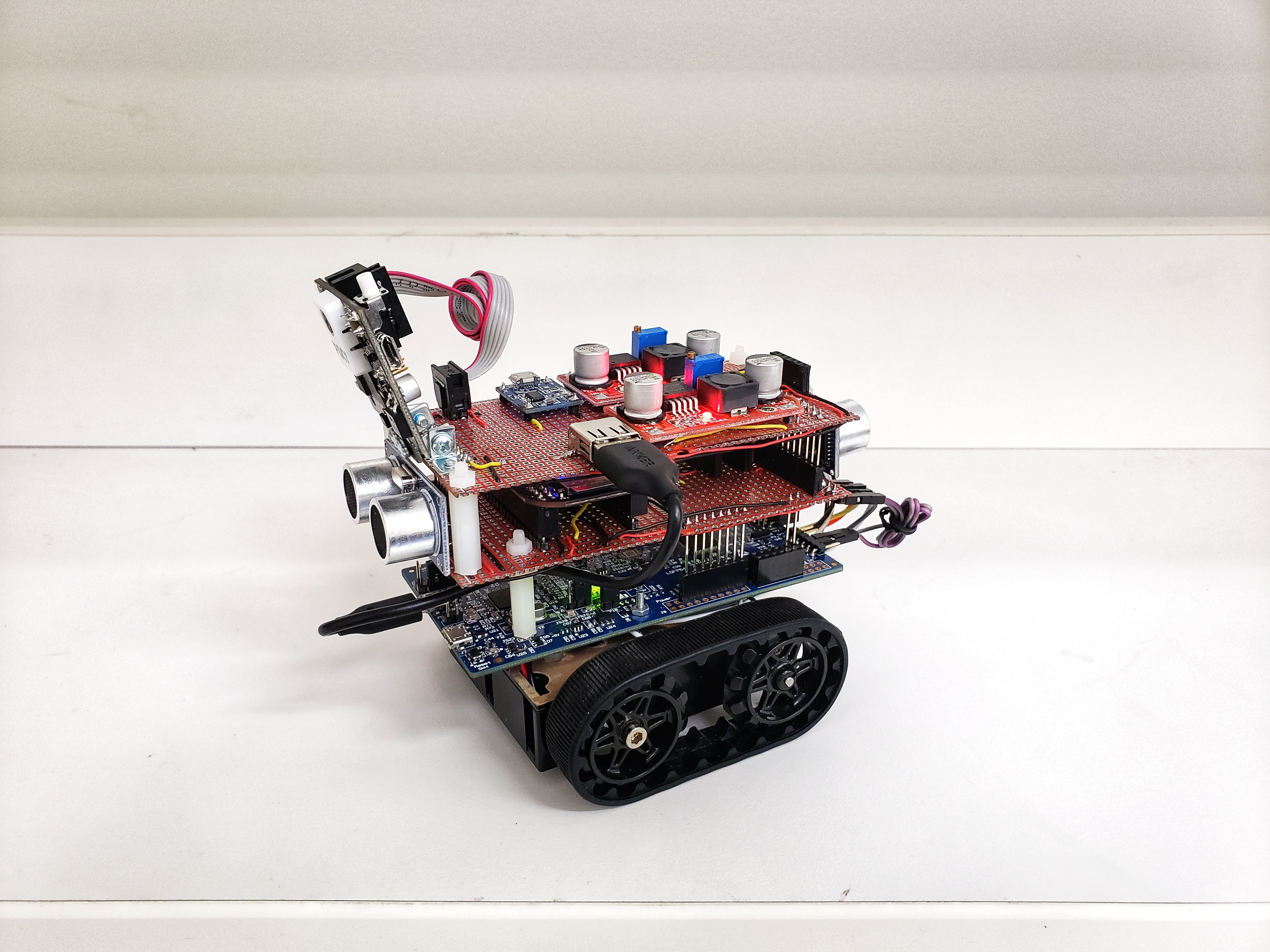
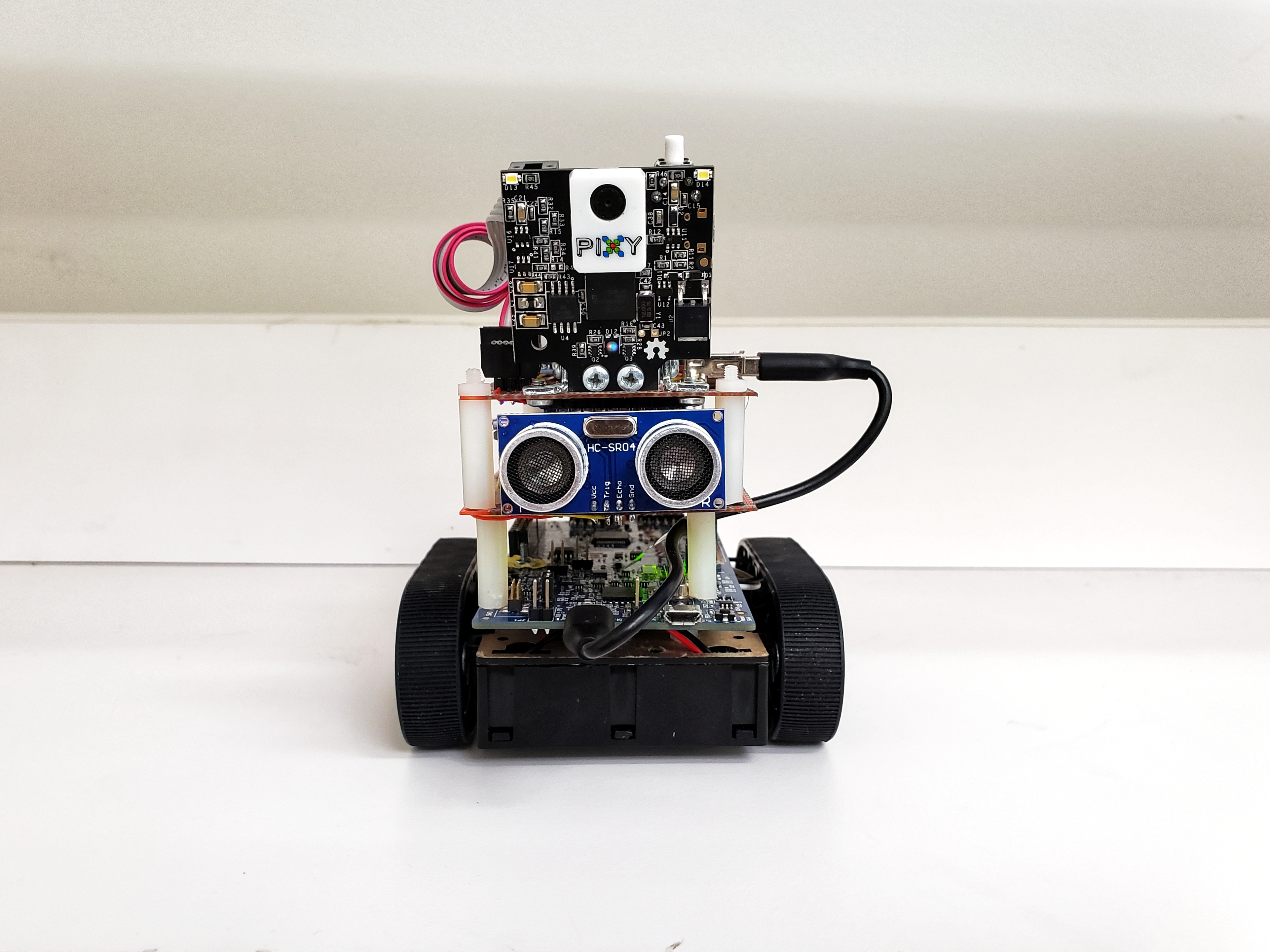
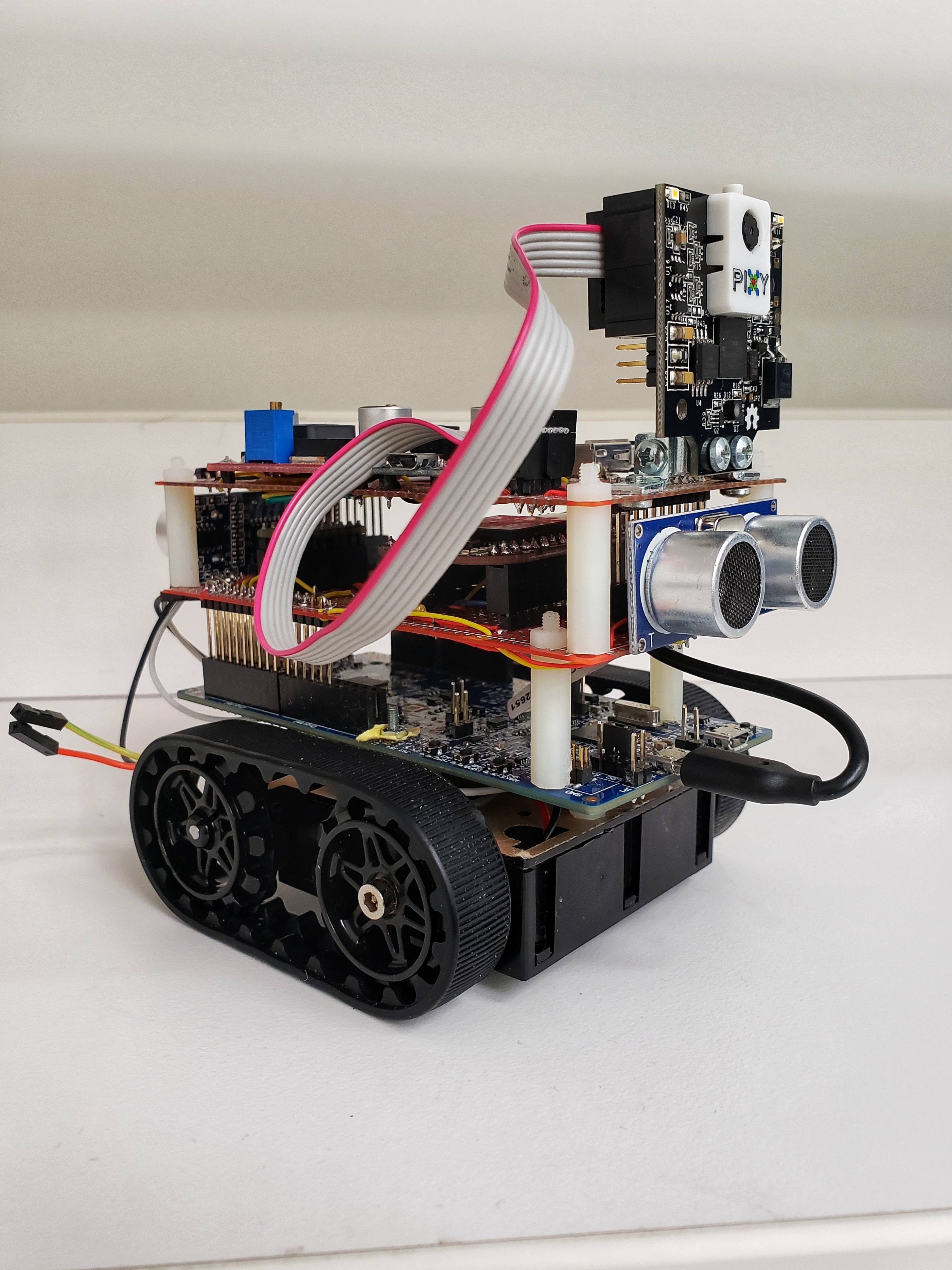
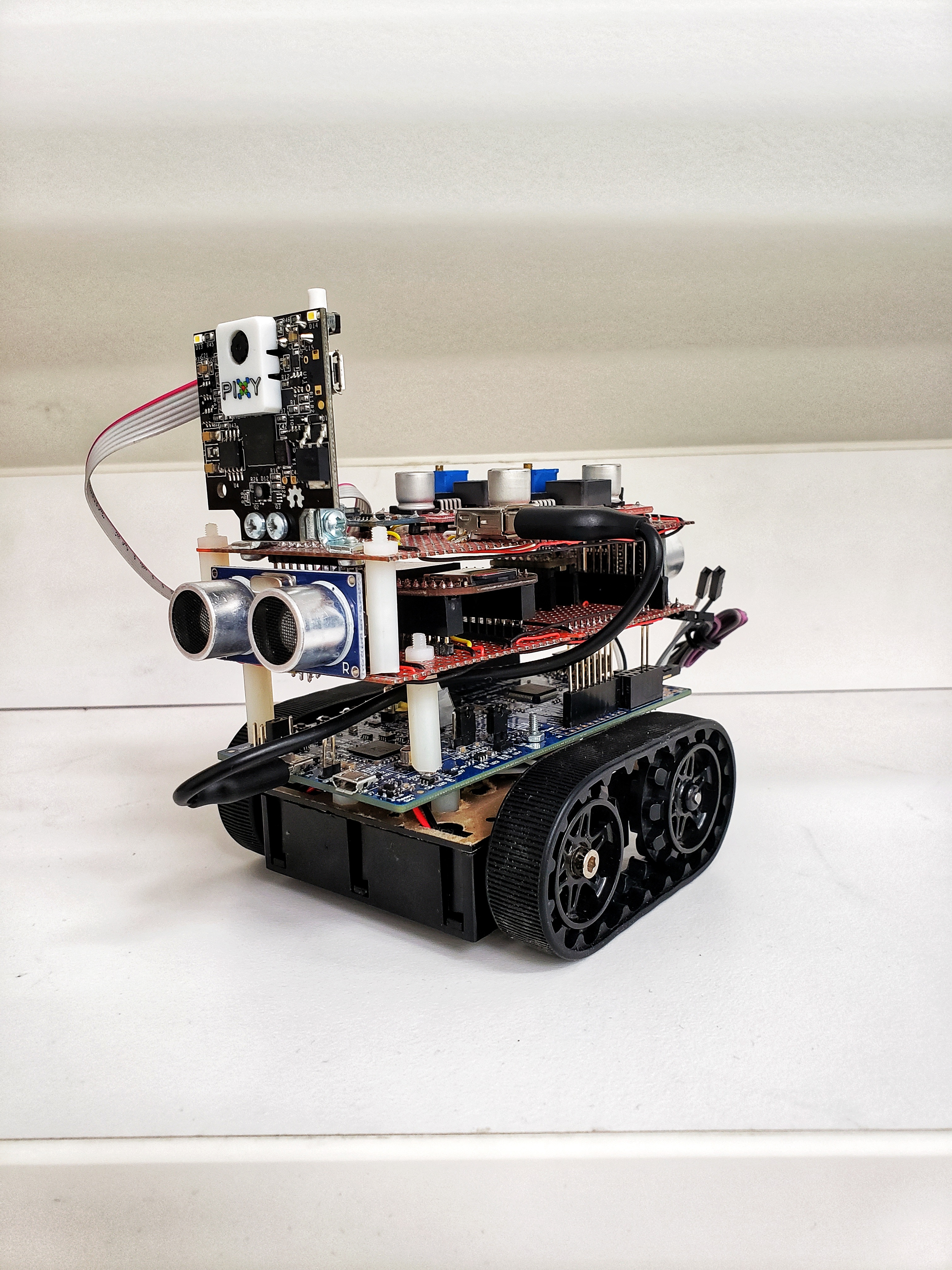
Pixybot is an autonomous robot which is capable of recognizing objects with specific shape, size and color. It is designed to move automatically and follow objects while avoiding obstacles. The robot is using two different micro-controllers LPC 54114 and Pocket beagle. The pixy vision system is used for recognizing the object shape, color and size. Two ultrasonic sensors are used to avoid obstacles. The robot is driven by DC motors which are controlled by LPC54114 from NXP. The LPC54114 is running FreeRTOS whereas Pocket beagle is on LINUX. So, it can be said that this robot has two different brains interconnected with each other. The first one Pocket beagle is connected to pixy2 and LPC54114 is connected to DC motors.